« ตอบกลับ #2 เมื่อ: มกราคม 11, 2019, 09:09:36 AM »
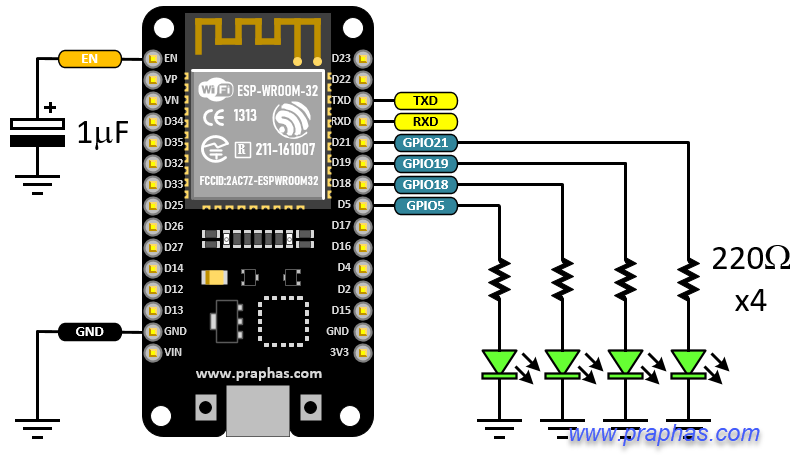
วงจรที่ใช้ในการทดลอง การเรียนรู้ในครั้งนี้เป็นการเรียนรู้การเขี้ยนโปรแกรมเพื่อใช้งานการสื่อสารผ่านพอร์ตอนุกรม ทั้งที่มีการส่งและรับข้อมูลเข้ามายังบอร์ดเพื่อควบคุมการทำงานต่าง ๆ วงจรที่ใช้งานเป็นดังรูป โดยใช้พอร์ตอนุกรม U0 เนื่องจากเป็นพอร์ตที่มีวงจรแปลงสัญญาณจาก UART เป็น USB ไว้อยู่แล้ว ซึ่งปกติจะใช้พอร์ตนี้ในการโปรแกรมตัวเองเมื่อผู้ใช้กด Upload ในโปรแกรม Arduino IDE
ตัวอย่างโปรแกรมที่ 1
ส่งค่าสถานะของ LED ที่เชื่อมต่อใช้งานจำนวน 4 ตัว ออกทางพอร์ตอนุกรมเพื่อแสดงผลหน้าจอคอมพิวเตอร์ด้วยโปรแกรม Serial monitor ของ Arduino IDE
#define LED1 21
#define LED2 19
#define LED3 18
#define LED4 5
void send2port(char data);
void setup() {
pinMode(LED1,OUTPUT);
pinMode(LED2,OUTPUT);
pinMode(LED3,OUTPUT);
pinMode(LED4,OUTPUT);
Serial.begin(9600);
}
void loop() {
for(byte i=0;i<15;i++){
send2port(i);
Serial.print("Status of LED is :");
Serial.println(i,BIN);
delay(500);
}
}
void send2port(char data)
{
digitalWrite(LED1,data & 1 ? 1:0);
digitalWrite(LED2,data & 2 ? 1:0);
digitalWrite(LED3,data & 4 ? 1:0);
digitalWrite(LED4,data & 8 ? 1:0);
}
#define LED1 21
#define LED2 19
#define LED3 18
#define LED4 5
void setup() {
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
pinMode(LED4, OUTPUT);
Serial.begin(9600);
}
void loop() {
for (byte i = 0; i < 100; i++) {
Serial.print(".");
delay(200);
if (Serial.available()) {
char inChar = Serial.read();
digitalWrite(LED1, inChar == '1' ? 1 : 0);
digitalWrite(LED2, inChar == '2' ? 1 : 0);
digitalWrite(LED3, inChar == '3' ? 1 : 0);
digitalWrite(LED4, inChar == '4' ? 1 : 0);
Serial.println();
Serial.print("Data received is: ");
Serial.println(inChar);
}
}
Serial.println();
}
« แก้ไขครั้งสุดท้าย: มกราคม 15, 2019, 10:52:34 AM โดย admin »

บันทึกการเข้า
