ทดลอง MCU ตอนที่ 8 (DC Motor)
Page 1 of 3
ในการประยุกต์ใช้งานไมโครคอนโทรลเลอร์ตั้งแต่อดีตจนถึงปัจจุบัน สิ่งที่นำไปประยุกต์ใช้งานที่แพร่หลายอย่างหนึ่งคือการนำไปควบคุมการทำงานของมอเตอร์ไฟฟ้ากระแสตรง เช่นการควบคุมการเคลื่อนไหวของหุ่นยนต์ เนื่องจากมอเตอร์ไฟฟ้ากระแสตรงสามารถใช้พลังงานจากแบตเตอรี ซึ่งจะต้องบรรจุอยู่ใยตัวหุ่นยนต์ และอีกประการหนึ่งคือมอเตอร์ไฟฟ้ากระแสตรงสามารถควบคุมการทำงานได้ง่าย

*ภาพจาก www.robotshop.us
มอเตอร์ไฟฟ้ากระแสตรงสามารถทำงานได้เต็มพิกัดตามที่ระบุที่ตัวมอเตอร์ เช่นมอเตอร์ขนาด 12 โวลต์ทำงานที่สภาพไม่รับภาระ(No Load) ได้ความเร็ว 200 รอบต่อนาที (RPM) เราสามารถที่บังคับให้มอเตอร์ทำงานเกินพิกัดได้เล็กน้อย โดยการเพิ่มแรงดันให้กับตัวมอเตอร์ แต่จะทำให้มอเตอร์ทำงานหนักและอาจเสียหายได้ ในทางปฏิบัติจะใช้มอเตอร์ที่มีความเร็วสูงตามต้องการหากปรับความเร็วจะทำเฉพาะการลดความเร็วเท่านั้น การลดความเร็วทำได้โดยการลดแรงดันที่จ่ายให้กับมอเตอร์
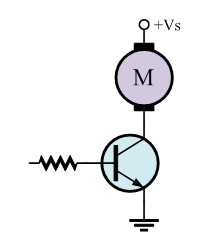
สำหรับการลดแรงดันจะใช้ทรานซิสเตอร์ต่ออนุกรมโดยบังคับที่กระแสเบสแทน แต่จะใช้การควบคุมแบบ PWM แทนการจ่ายกระแสต่อเนื่อง เพราะการจ่ายกระแสต่อเนื่องจะทำให้เกิดแรงดันตกคร่อมทรานซิสเตอร์ขณะนำกระแส ซึ่งจะทำให้เกิดการสูญเสียพลังงาน
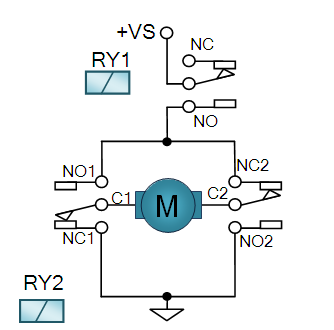
สำหรับการควบทิศทางการหมุนสามารถทำได้โดยการกลับขั้วของแหล่งจ่ายที่จ่ายให้กับมอเตอร์ตัวอย่างเช่นในรูปใช้รีเลย์เป็นอุปกรณ์ในการควบคุมทิศทางการหมุน
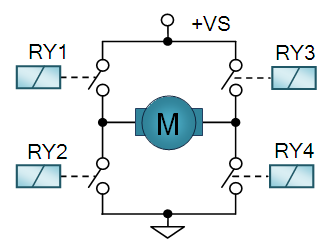
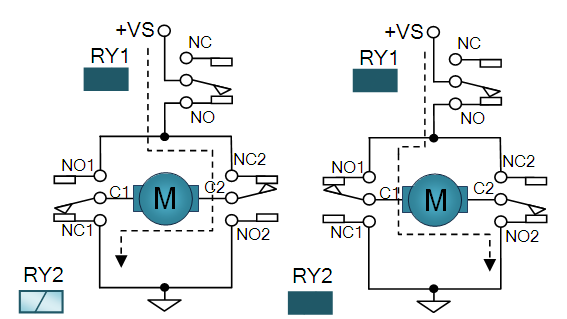
รีเลย์ตัวที่ 1 (RY1) กับรีเลย์ตัวที่ 4 (RY4) จะทำงานพร้อมกัน มอเตอร์จะได้รับการจ่ายแรงดันดังรูป
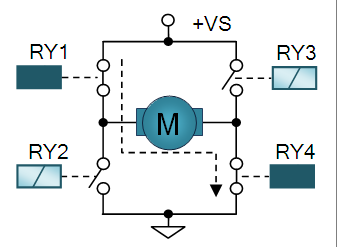
หากต้องการให้มอเตอร์หมุนกลับทิศทาง จะบังคับให้ รีเลย์ตัวที่ 2 (RY2) กับรีเลย์ตัวที่ 3 (RY3) เป็นตัวทำงานดังรูป
จากวงจรข้างต้นมีข้อเสียตรงที่เมื่อใด รีเลย์ตัวที่ 1 (RY1) กับรีเลย์ตัวที่ 2 (RY2) หรือ รีเลย์ตัวที่ 3 (RY3) กับรีเลย์ตัวที่ 4 (RY4) เกิดทำงานพร้อมกัน(ซึ่งอาจเกิดขึ้นได้จากความผิดพลาดใดก็ตาม) จะเกิดความเสียหายได้เนื่องจะเกิดการลัดวงจรของแหล่งจ่ายโดยตรง
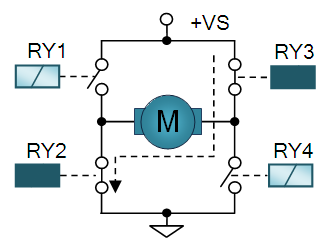
วิธีแก้ไขทำได้โดยการต่อวงจรดังรูป
รีเลย์ 2(RY2) เป็นรีเลย์ 2 คอนแทคซึ่งจะไม่มีโอกาสลัดวงจรได้เลยการควบคุมเป็นดังรูป
- Prev
- Next >>